
Bite-Bot: A robotic platform for studying envenomation

Open-Source, Low-Cost, 3D Printed platform
Envenomation is a complex process involving multi-physics interactions between the fang, the liquid venom, and the tissue of the target. Direct measurements of how fang shape modulates in-wound venom transport are scarce, as most studies isolate puncture performance or conduit hydrodynamics. It is widely assumed that tubular anterior fangs enable the most rapid, high-pressure delivery, but rigorous cross-type, standardized comparisons of delivery efficiency are limited. Here, we present Bite-Bot, a robotic platform designed to facilitate highly controlled experiments that reveal the constituent and combined effects of evolutionary variation in the envenomer and the target tissue. First, we obtained uCT scans of snake fangs that varied in overall shape and venom delivery mechanism and 3D printed them in titanium. Our robot controls the angle of attack, speed, and force of the bite. The robot also injects our bespoke venom phantom, which matches the rheological properties of specific snake species, at a given pressure. By leveraging robotics, we can now more holistically and empirically study the complex physical interactions and the coevolution between the envenomer and the target tissue.

Integrated Systems for Simultaneous Control
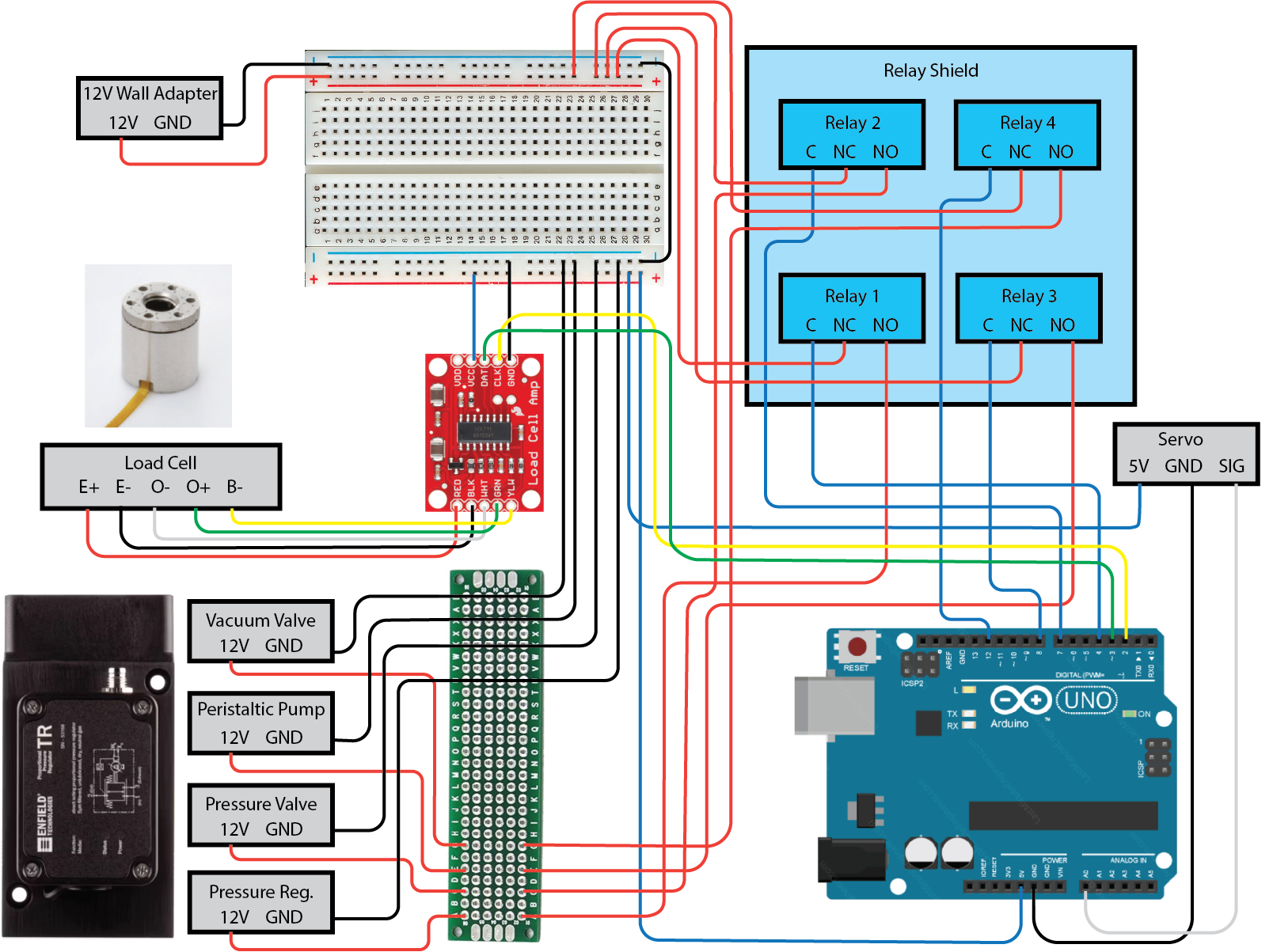
Our Matlab-based software synchronizes control of a servo and pressure regulator while collecting data from a load cell.
3D Printed Titanium Snake Fang
These durable snake fangs are printed at 100% scale and can be reused without incurring damage. You can digitally sculpt different venom delivery mechanisms to empirically evaluate theoretical or extinct morphologies.