
Emergent Sequential Motion Through Compliant Auxetic Shells
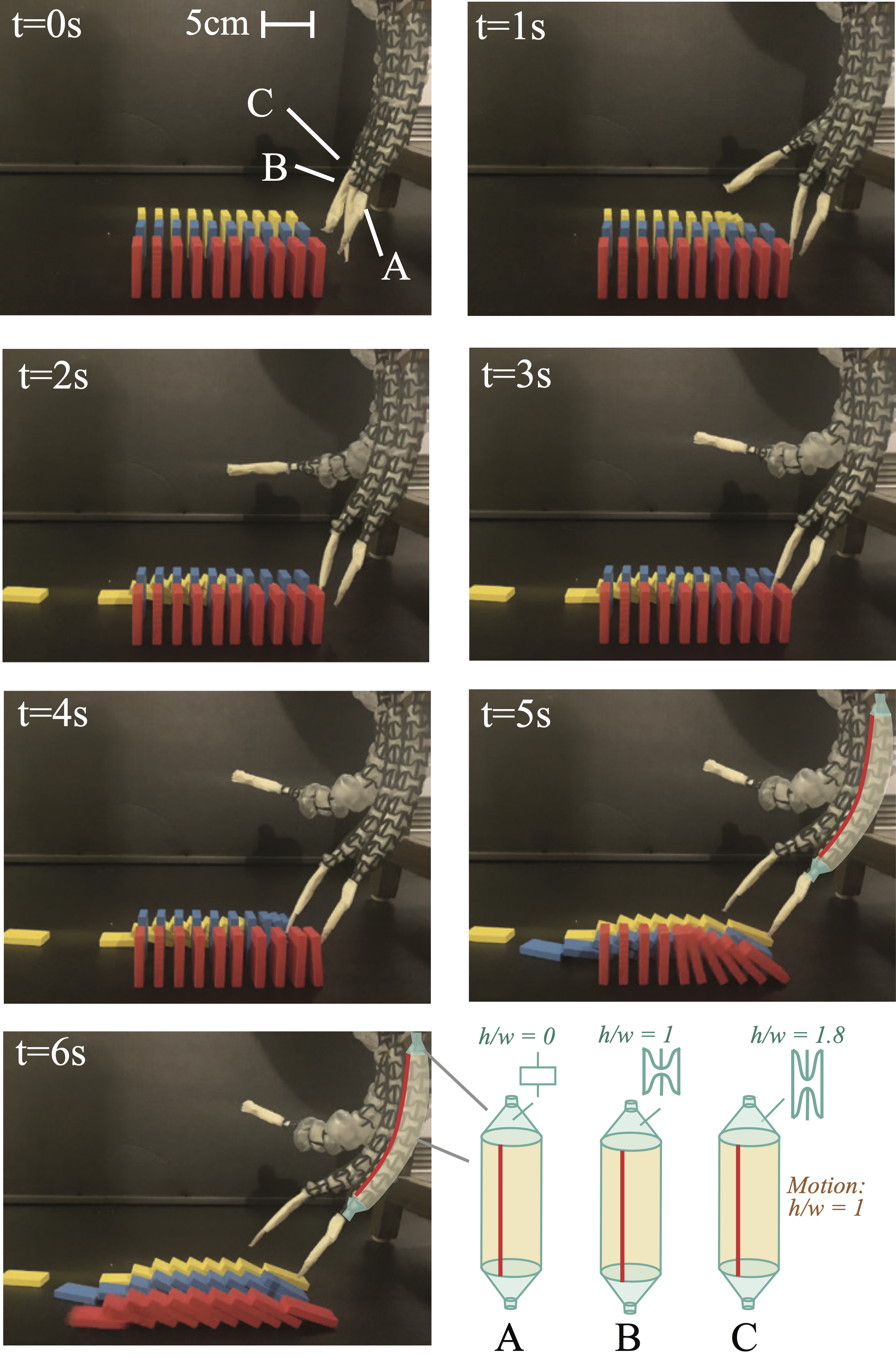
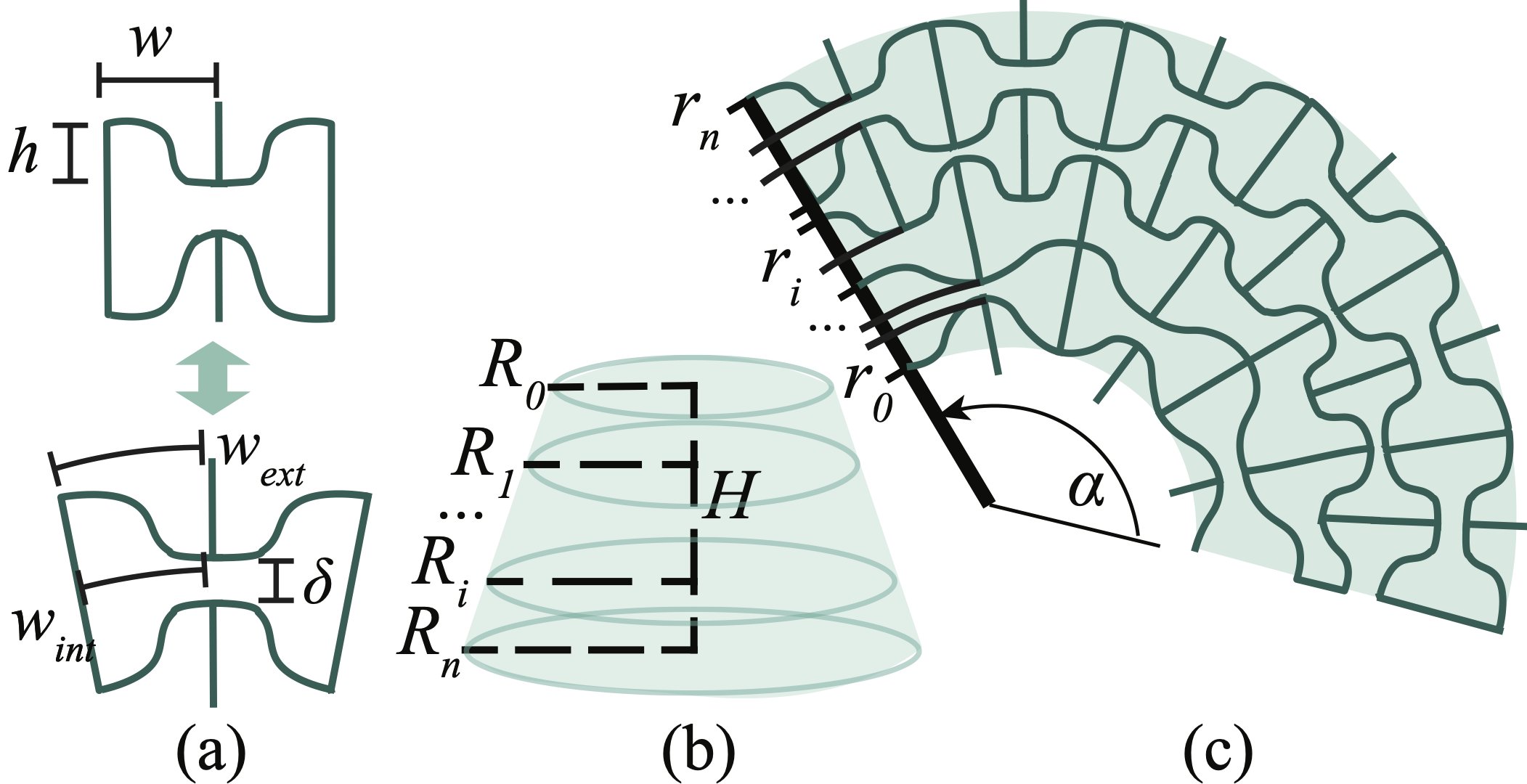
Though they are compliant, nimble and morphologically intelligent, fluidic soft robots often rely on bulky components for power and actuation. This work contributes a design methodology which enables development of soft fluidic robots that move in a sequenced fashion, enabling lightweight devices with embodied intelligence. Bézier-curved beams were introduced as a design building block whose antagonistic placement results in Representative Auxetic Element (RAE) that can be patterned on inflatable shells. Kinematics and loading behaviour of these design building blocks were studied through Finite Element Analysis (FEA). We give a methodology for patterning RAEs on cylindrical and conic shells to create soft fluidic components that move (motion components) and those that delay fluid flow (pinch components). We verify the physical concepts governing the design methodology through two prototype devices that produce sequenced motion under a single fluidic input. Devices using this framework have the potential to perform complicated sequenced motions with lightweight control components.
@inproceedings{sedal2023emergent,
title={Emergent Sequential Motion Through Compliant Auxetic Shells},
author={Sedal, Audrey and Kohler, Margaret and Agbofode, Godswill and Moore, Talia Y and Kota, Sridhar},
booktitle={2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={10238--10244},
year={2023},
organization={IEEE}
}