
MICSR: A Mixing, Current-Sensing Robot
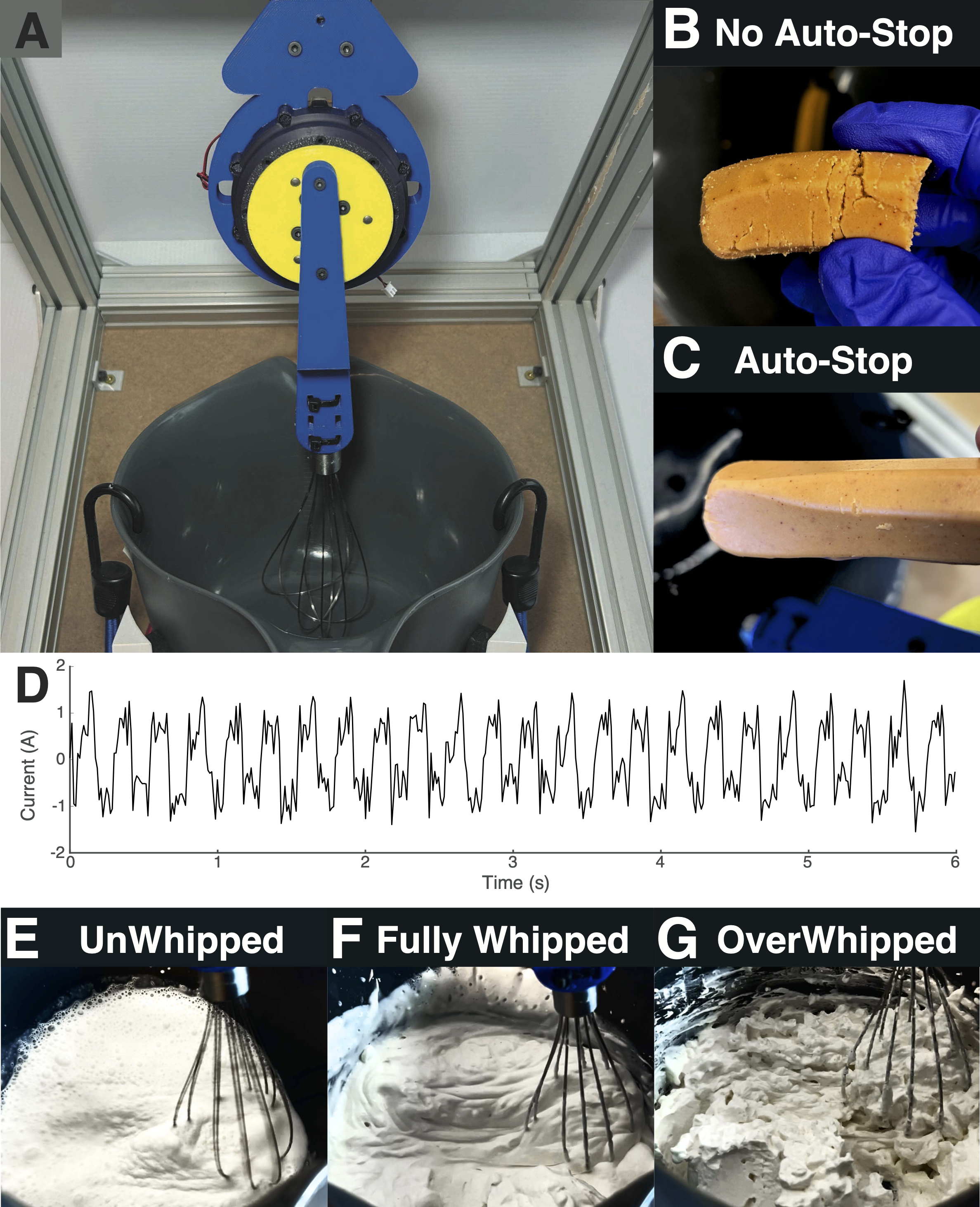
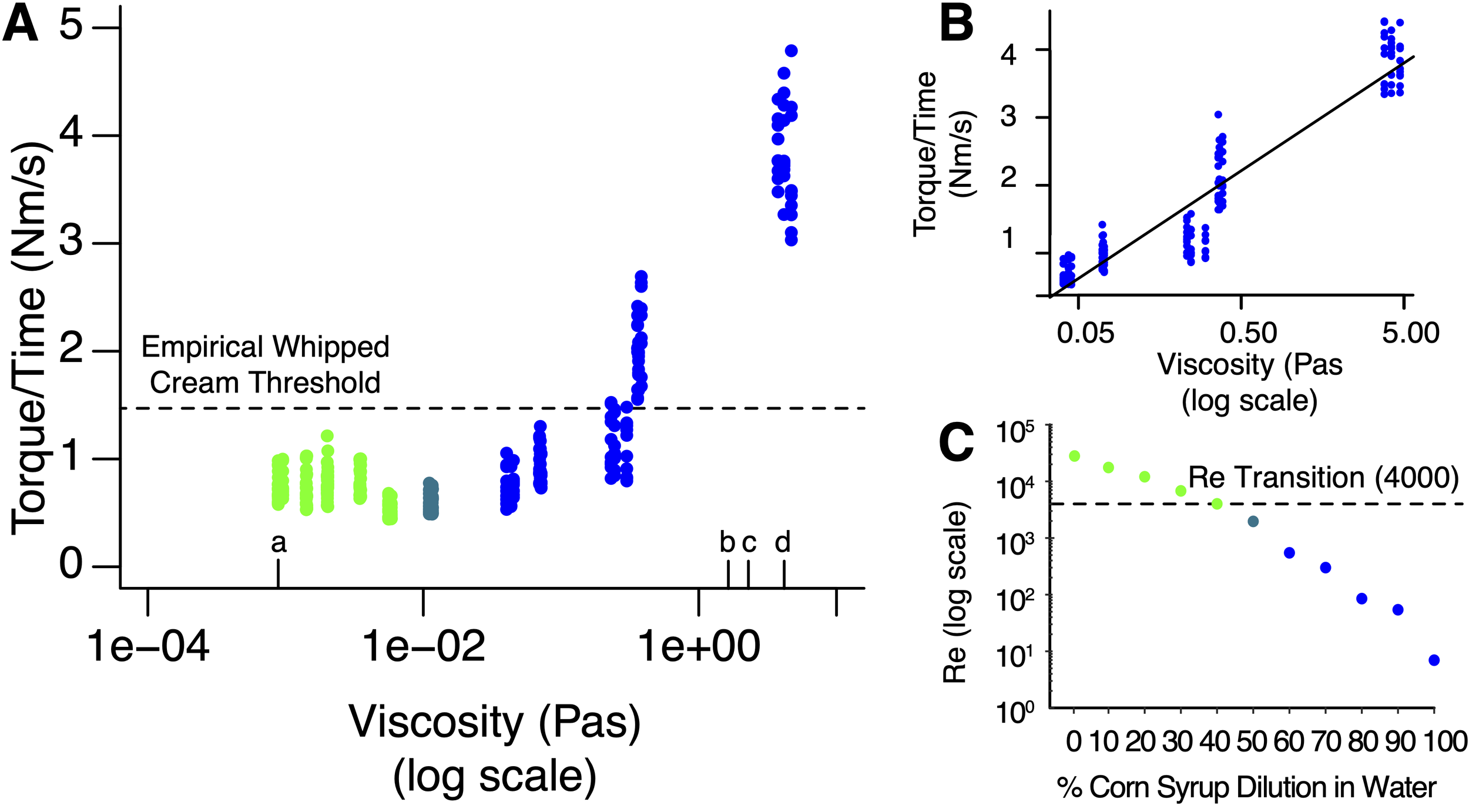
The design of culinary mixers, whether commercial or domestic, has not changed in decades; they continue to use non-backdrivable motors and feedforward control. There are two problems with this standard design: human contact during operation can lead to severe injury and whisking duration is determined by subjective human evaluation. For example, the key to properly whisking cream and egg whites is knowing when to stop. Once overwhipped, the ingredients cannot be salvaged for their original use, generating unnecessary food waste. Whether mixing by hand or with a stand mixer, bakers must periodically stop whisking to evaluate the viscosity of the medium. Recipes ubiquitously describe whisking until ``stiff peaks'’ are achieved, which is an imprecise and subjective metric. To address this challenge, we present MICSR, a Mixing, Current-Sensing Robot. MICSR uses a quasi-direct drive actuator that continuously senses the torque generated by the viscosity of the medium while whisking. A tuned PID controller minimizes overshoot and rise time, enabling MICSR to rapidly whisk the medium at a constant frequency of 6~Hz. MICSR first evaluates a benchmark to set the desired torque threshold by whisking for ten seconds. Then with an unwhipped medium, such as liquid cream, MICSR rapidly whisks and automatically stops when the torque reaches the threshold. Using an objective torque threshold, MICSR leverages the current-sensing capabilities of quasi-direct drive actuators to rapidly whisk culinary media without overwhipping. The torque threshold also acts as a safety feature, automatically stopping when an unexpected contact is made, simulated here with a hot dog. This robot has the potential to greatly reduce food waste associated with training novice bakers and reduce the risk of injury for children cooking with their parents. PATENT PENDING
@inproceedings{Jamal2025,
title={{MICSR: A Mixing, Current Sensing Robot}},
author = {Saima Jamal and Benjamin Andelman and Moore, Talia Y.},
year = {\emph{in review}},
booktitle = {IEEE IROS}
}